Charles XuI am currently a research intern at Physical Intelligence Inc. Before this, I finished my undergrad at UC Berkeley in EECS in May 2024 , where I conducted research with Prof. Sergey Levine at the Robotic AI & Learning Lab. I've also had the pleasure of working with Stefan Schaal. My research interests lie at the intersection of robotics and machine learning, specifically developing more scalable and generalizable Reinforcement Learning and Imitation Learning methods for building robust and deployable robotic manipulation systems. xuc [at] berkeley [dot] edu / GitHub / Google Scholar |

|
|
RLDG: Robotic Generalist Policy Distillation via Reinforcement LearningCharles Xu, Qiyang Li, Jianlan Luo, Sergey Levine arXiv Preprint website / paper |
|
Precise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement LearningJianlan Luo†, Charles Xu†, Jeffrey Wu, Sergey Levine Under Review, Science Robotics website / paper |
|
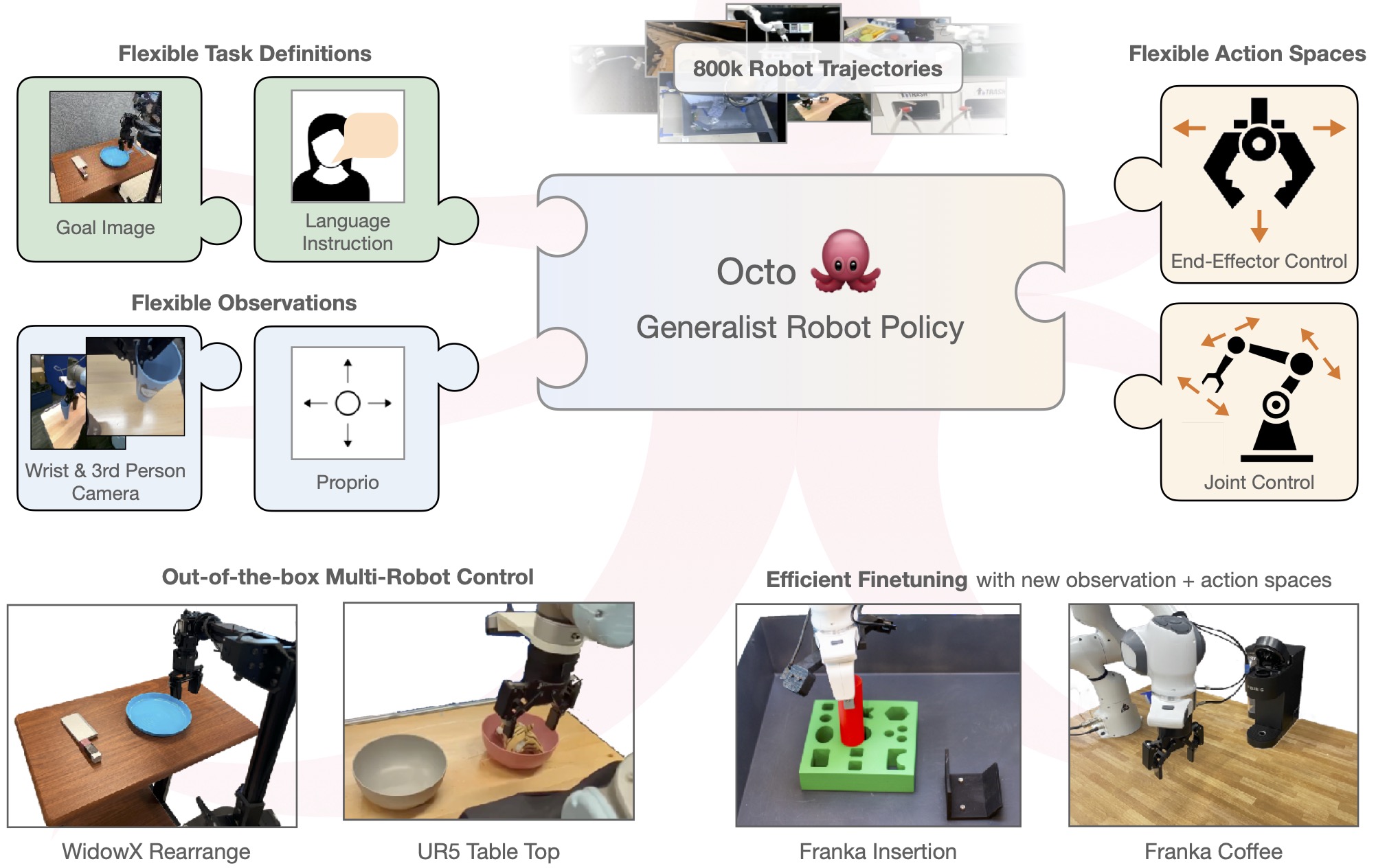
Octo: An Open-Source Generalist Robot PolicyDibya Ghosh*, Homer Walke*, Karl Pertsch*, Kevin Black*, Oier Mees*, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, Jianlan Luo, You Liang Tan, Dorsa Sadigh, Chelsea Finn, Sergey Levine Robotics: Science and Systems 2024 website / paper / code |
|
SERL: A Software Suite for Sample-Efficient Robotic Reinforcement LearningJianlan Luo*, Zheyuan Hu*, Charles Xu, Siri Gadipudi, Archit Sharma, Rehaan Ahmad, Stefan Schaal, Chelsea Finn, Abhishek Gupta, Sergey Levine IEEE International Conference on Robotics and Automation (ICRA) 2024 website / paper / video / code |
|
Open X-Embodiment: Robotic Learning Datasets and RT-X ModelsOpen X-Embodiment Collaboration IEEE International Conference on Robotics and Automation (ICRA) 2024 ICRA 2024 Best Paper Award website / paper / code / data |
|
FMB: A Functional Manipulation Benchmark for Generalizable Robotic LearningJianlan Luo*, Charles Xu*, Fangchen Liu, Liam Tan, Zipeng Lin, Jeffrey Wu, Pieter Abbeel, Sergey Levine The International Journal of Robotics Research website / paper / video / code / data |
|
Multi-Stage Cable Routing through Hierarchical Imitation LearningJianlan Luo*, Charles Xu*, Xinyang Geng, Gilbert Feng, Kuan Fang, Liam Tan, Stefan Schaal, Sergey Levine IEEE Transactions on Robotics, 2024 website / paper / video / code / data |

|
EECS C106A/206A: Introduction to RoboticsLab Assistant: Fall 2023 |
|
CS 189: Introduction to Machine LearningTutor: Spring 2023 |
|
Design and source code from Jon Barron's website |