Charles XuI am currently a PhD student at UC Berkeley, advised by professor Sergey Levine. I recently interned at Physical Intelligence, where I built a system for real-world online RL with VLA's. Before this, I finished my undergrad at UC Berkeley in EECS in May 2024, where I also conducted research with professor Sergey Levine. I've also had the pleasure of working with Stefan Schaal from Intrinsic. My research interest is learning from real-world experience through on-robot online reinforcement learning for scalable and deployable robot systems. xuc [at] berkeley [dot] edu / GitHub / Google Scholar |

|

|
Test-Time Gradient Guidance of Flow Policies in Reinforcement LearningZhiyuan Zhou, Andy Peng, Charles Xu, Qiyang Li, Jost Tobias Springenberg, Kevin Frans, Sergey Levine arXiv preprint, 2026 website / paper / code |
|
π0.7: a Steerable Model with Emergent CapabilitiesPhysical Intelligence Team arXiv preprint, 2026 website / paper |

|
RL Token: Bootstrapping Online RL with Vision-Language-Action ModelsCharles Xu, Jost Tobias Springenberg, Michael Equi, Ali Amin, Adnan Esmail, Sergey Levine, Liyiming Ke arXiv preprint, 2026 website / paper |
|
RLDG: Robotic Generalist Policy Distillation via Reinforcement LearningCharles Xu, Qiyang Li, Jianlan Luo, Sergey Levine Robotics: Science and Systems 2025 website / paper |
|
Precise and Dexterous Robotic Manipulation via Human-in-the-Loop Reinforcement LearningJianlan Luo†, Charles Xu†, Jeffrey Wu, Sergey Levine Science Robotics, 2025 website / paper |
|
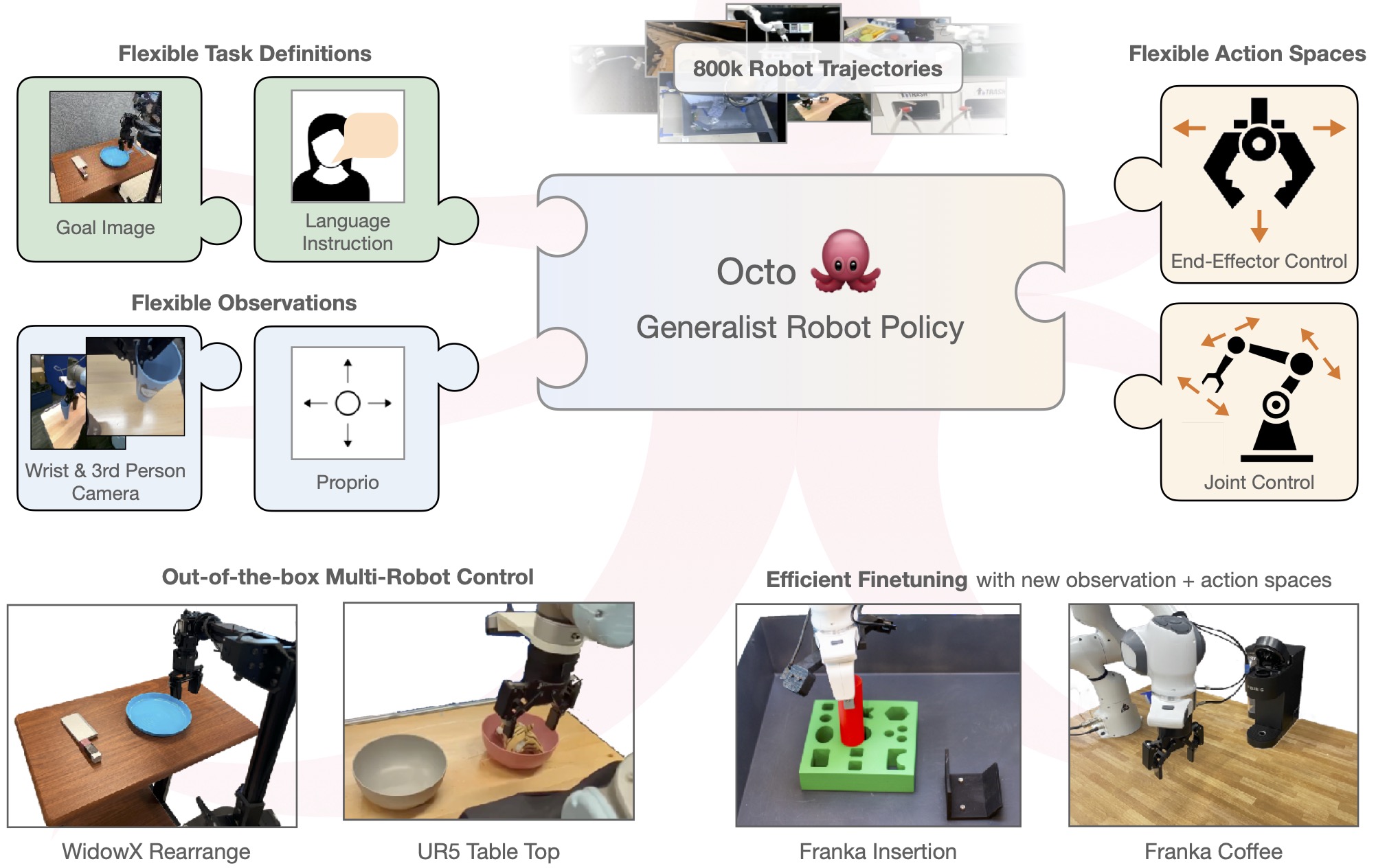
Octo: An Open-Source Generalist Robot PolicyDibya Ghosh*, Homer Walke*, Karl Pertsch*, Kevin Black*, Oier Mees*, Sudeep Dasari, Joey Hejna, Tobias Kreiman, Charles Xu, Jianlan Luo, You Liang Tan, Dorsa Sadigh, Chelsea Finn, Sergey Levine Robotics: Science and Systems 2024 website / paper / code |
|
SERL: A Software Suite for Sample-Efficient Robotic Reinforcement LearningJianlan Luo*, Zheyuan Hu*, Charles Xu, Siri Gadipudi, Archit Sharma, Rehaan Ahmad, Stefan Schaal, Chelsea Finn, Abhishek Gupta, Sergey Levine IEEE International Conference on Robotics and Automation (ICRA) 2024 website / paper / video / code |
|
Open X-Embodiment: Robotic Learning Datasets and RT-X ModelsOpen X-Embodiment Collaboration IEEE International Conference on Robotics and Automation (ICRA) 2024 ICRA 2024 Best Paper Award website / paper / code / data |
|
FMB: A Functional Manipulation Benchmark for Generalizable Robotic LearningJianlan Luo*, Charles Xu*, Fangchen Liu, Liam Tan, Zipeng Lin, Jeffrey Wu, Pieter Abbeel, Sergey Levine The International Journal of Robotics Research website / paper / video / code / data |
|
Multi-Stage Cable Routing through Hierarchical Imitation LearningJianlan Luo*, Charles Xu*, Xinyang Geng, Gilbert Feng, Kuan Fang, Liam Tan, Stefan Schaal, Sergey Levine IEEE Transactions on Robotics, 2024 website / paper / video / code / data |

|
EECS C106A/206A: Introduction to RoboticsLab Assistant: Fall 2023 |
|
CS 189: Introduction to Machine LearningTutor: Spring 2023 |
|
Design and source code from Jon Barron's website |